- Thymio II : suivi de ligne
INTRODUCTION:
- I - Nos recherches
- * Notre première démarche :
- Puis, création d'un programme visuellement avec VPL ( visual programming language)
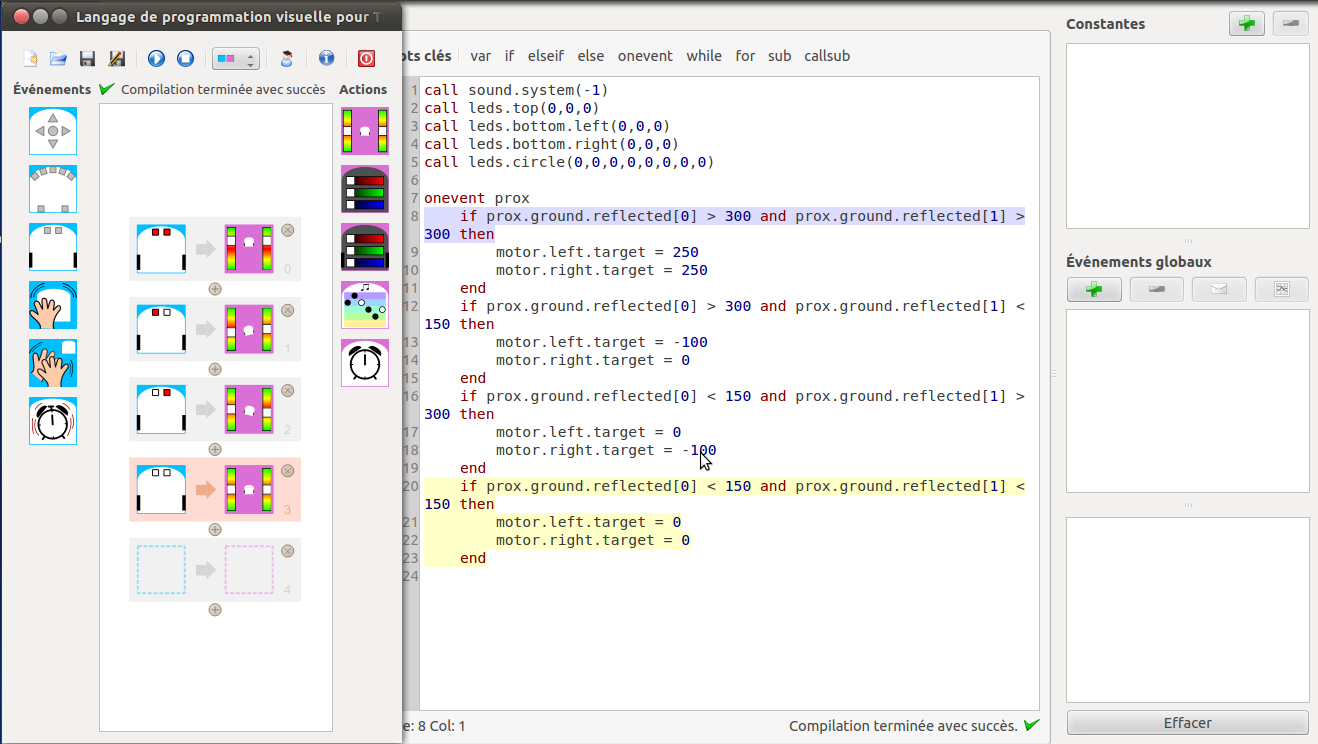
- Les problèmes rencontrés
- - Le programme ne fonctionne que pour des bandes de 4 cm de largeur minimum
- - Indications du programme non nécessaires pour certaines
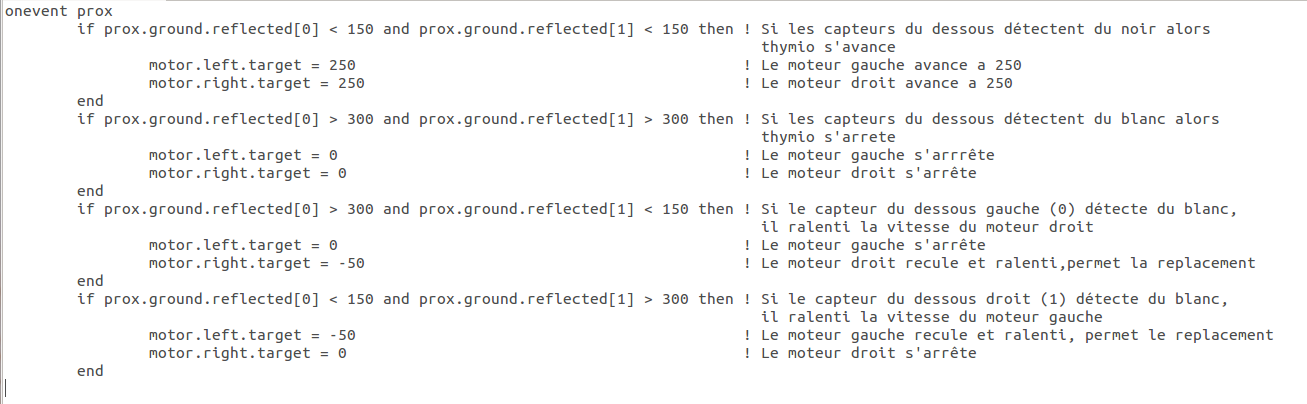
- II - Notre avancée
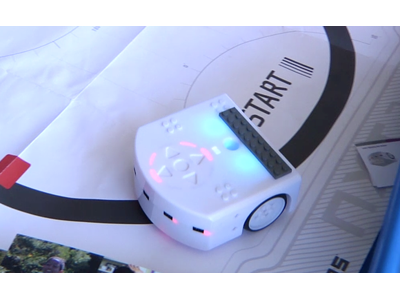
- Notre résultat :
-
- Sources :